Guide#
UltraZohm is a powerful real-time computation unit
The UltraZohm is used to control power electronics and electrical drives
The UltraZohm is work in progress
Funded by BMBF-Project KI-Power
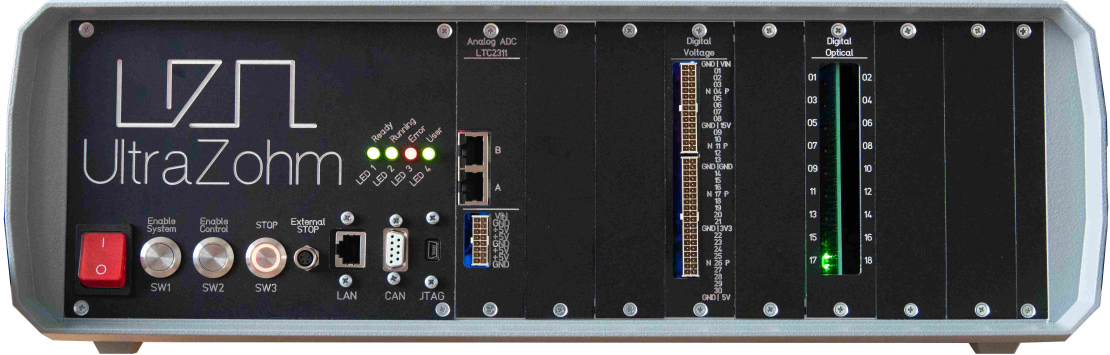
Fig. 16 Front of the UltraZohm.#
Requirements of the UltraZohm#
Development goals#
- Computational power
The use of more complex control algorithms based on model predictive control and/or artificial intelligence, as well as the increased use of wide-band gap power electronics, require a real-time computing unit with sufficient processing power. The necessary processing power is provided by the UltraZohm. A heterogenous SoC is used due to the diverse requirements of different applications and control algorithms. The UltraZohm project uses the Xilinx Zynq UltraScale+ MPSoC on a SoM by Trenz Electronics.
- Hard real-time
Fast calculations are not sufficient for the control of power electronics which require hard real-time, i.e. the system must meet the real-time at all times. Missing the real-time results in malfunction, undefined behavior or failure of the system. The UltraZohm is designed to meet these hard real-time requirements. Control algorithms for power electronics and electrical drives typically require a control time of \(5 \mu s\) to \(100 \mu s\).
- Modularity
The UltraZohm is modular in terms of software and hardware. The system can be used with different devices within the UltraScale MPSoC family. Adapter cards are used as a flexible interface for analoge and digital signals such as ADC’s and gate signals for power electronics. Software modularity is achieved by using encapsulated design patterns combined with IP-Cores on the FPGA.
- Usability
We aim to create a system with a high usability. The UltraZohm is novice friendly since there are a lot of different tutorials, existing IP-Cores and adapter cards that are used by the community. Therefore, a new user does not have to start from scratch. The UltraZohm is expert friendly since there are no black boxes in the system. Due to project being open source, every user can investigate every line of code, every IP-Core and the complete signal chain in the schematics. Furthermore, everybody is encouraged to contribute to the UltraZohm and improve the system!
Requirements#
The following requirements are derived from the development goals of the UltraZohm.
Category |
Name |
Requirement |
Documentation |
|---|---|---|---|
Real-time |
MPC-Control |
FCS-MPC with N=3 calculation time below 5us |
|
Real-time |
FOC control of PMSM |
State of the art FOC |
|
Real-time |
MPC-Control in lab |
FCS-MPC with N=3 is evaluated with a demonstrator |
|
Adapter card |
Slow ADC (up to 125 kSPS) |
Up to 100 parallel measurements |
|
Adapter card |
Fast ADC (up to 5 MPSP) |
Up to 24 parallel measurements |
|
Adapter card |
Digital interface for control signals of inverter |
3V3/5V/15V |
|
Adapter card |
Optical interface card |
18 channels |
|
Adapter card |
Encoder Card |
Common encoder interfaces (Resolver Incremental) |
|
AI |
Neural network on FPGA |
Common neural networks in reinforcement learning can be computed on the FPGA with calculation time below 10us |
|
AI |
Control of PMSM by reinforcement learning controller |
Usage of DQN to control PMSM |
|
Usability |
C-Code generation toolchain and documentation |
Easy usage of Embedded-Coder for targeting R5 |
|
Usability |
HDL-Code generation toolchain and documentation |
Easy usage of HDL-Coder for targeting R5 |
|
Safety |
Safe platform |
Provide hardware to allow certification |
|
Safety |
Basic safety functions for safe operation of the system |
||
Safety |
Functions to protect the system from damage |
||
Community |
Training of young researchers and students |
||
Community |
Building a research community around the UltraZohm |
Overview of the project#
The UltraZohm project is hosted on a bitbucket repository.
The repository is structured in the following way, with some important files highlighted.
The source of this documentation is located in ultrazohm_sw/docs/source/.
The online version (docs.ultrazohm.com) is always the documentation of the current state of the main branch.
ultrazohm_sw/
├── docs/
| ├── source/
| ├── requirements.txt
| └── Makefile
├── ip_core/
├── javascope/
├── tcl_scripts/
| ├── vivado_export_xsa.tcl
│ ├── vitis_generate_UltraZohm_workspace.tcl
│ └── vitis_update_platform.tcl
├── vitis/
| ├── software/
│ └── vivado_exported_xsa
| └── zusys_wrapper.xsa
└── vivado/
└── project/
└── ultrazohm.xpr
Simple block diagram of UltraZohm#
Components of UltraZohm#
Interfaces of Carrier-Board#
Interfaces of Cabinet#
Code generation
Javascope