Multi-phase VSD and Park transformation IP core#
IP cores for multi-phase VSD and Park transformation (six-phase and nine-phase versions implemented individually)
Applies multi-phase VSD transformation to input and Park transformation to only alpha and beta values
Performs respective inverse transformation
Input interface is PL-only
Transformation can only be triggered by a PL signal, but not by the software driver
Output is supplied to PL-ports as well as AXI
Inputs and outputs are fixed point
The AXI values of
theta_el_axiandx_abc_out_axiare updated to the current output whenever the inputtrigger_new_valuesis high, to allow synchronous sampling in combination with a PWM module
Port Name |
Port Type |
Data Type |
Interface |
Range |
Description |
Six-phase |
Nine-phase |
|---|---|---|---|---|---|---|---|
theta_el |
Input |
sfix18_En14 |
External Signal |
-8 to +7 |
electric rotor angle |
y |
y |
theta_el_axi |
Output |
sfix18_En14 |
AXI 0x100 |
-8 to +7 |
electric rotor angle |
y |
y |
trigger_new_values |
Input |
boolean |
External Signal |
trigger to update outputs |
y |
y |
|
x_abc1_ll_pl |
Input |
sfix27_En16 (3) |
External Signal |
-1024 to +1023 |
input phase values subset 1 for transformation as line-to-line |
y |
y |
x_abc2_ll_pl |
Input |
sfix27_En16 (3) |
External Signal |
-1024 to +1023 |
input phase values subset 2 for transformation as line-to-line |
y |
y |
x_abc3_ll_pl |
Input |
sfix27_En16 (3) |
External Signal |
-1024 to +1023 |
input phase values subset 3 for transformation as line-to-line |
n |
y |
x_out_dq |
Output |
sfix27_En16 (6/9) |
External Signal |
-1024 to +1023 |
output transfomed values |
y |
y |
x_in_dq |
Input |
sfix27_En18 (6/9) |
External Signal |
-256 to +255 |
input dq values for inverse transformation |
y |
y |
x_abc_out_axi |
Output |
sfix27_En18 (6/9) |
AXI 0x140 |
-256 to +255 |
output inverse transformed abc values to AXI |
y |
y |
x_abc_1 |
Output |
sfix27_En18 (3) |
External Signal |
-256 to +255 |
output inverse transformed abc subset 1 values |
y |
y |
x_abc_2 |
Output |
sfix27_En18 (3) |
External Signal |
-256 to +255 |
output inverse transformed abc subset 2 values |
y |
y |
x_abc_3 |
Output |
sfix27_En18 (3) |
External Signal |
-256 to +255 |
output inverse transformed abc subset 3 values |
n |
y |
refresh_values |
Output |
boolean |
External Signal |
feedback signal that trigger_new_values input has been acknowledged and outputs are updated |
y |
y |
VSD and Park transformation#
The IP core applies the transformations to the inputs x_abc1_ll_pl, x_abc2_ll_pl (and x_abc3_ll_pl for nine-phase IP core).
The values must be supplied as line-to-line values because a transformation to star values is applied in the IP core before applying the VSD transformation.
The line-to-line to star-value transformation is realized by applying the Clarke transformation to each three-phase subset, dividing the amplitudes by \(\sqrt{3}\) and rotating the pointers by -30° before applying the inverse Clarke transformation.
Although the naming “x” suggests, any values can be used as input, the intention is to use line-to-line voltages as input.
After the transformation to the stationary reference frame by application of the VSD transformation, the Park transformation is applied to the alpha and beta values only, yielding the following output vector (see below).
Note that the min and max values of the output vector (defined by the fixed-point datatype) are significantly smaller than the ones of the input values and must be taken into account when using the IP core.
Six-phase transformation#
The IP core uses the following VSD matrix according to [[1]] to transform the phase variables to the stationary reference frame:
Nine-phase transformation#
The IP core uses the following VSD matrix according to [[2]][[3]] to transform the phase variables to the stationary reference frame:
Inverse VSD and Park transformation#
The input x_in_dq is used for the inverse transformation.
The d and q values are transformed to alpha and beta with the inverse Park transformation.
Afterward, the inverse VSD transformation is applied which yields the phase variables.
The phase variables are output as star values and not line-to-line values!
Driver reference#
Six-phase transformation#
-
typedef struct uz_pmsm6ph_transformation_t uz_pmsm6ph_transformation_t#
-
struct uz_pmsm6ph_config_t#
Configuration struct for the PMSM model IP-Core driver.
-
uz_pmsm6ph_transformation_t *uz_pmsm6ph_transformation_init(struct uz_pmsm6ph_config_t config)#
Initialize an instance of the driver.
- Parameters:
config – Config struct
- Returns:
uz_pmsm6ph_transformation_t* Pointer to an initialized instance of the driver
-
uz_6ph_abc_t uz_pmsm6ph_transformation_get_currents(uz_pmsm6ph_transformation_t *self)#
Returns the results of the inverse transformation (phase varivables)
- Parameters:
self – Pointer to driver instance
- Returns:
struct uz_6ph_abc_t Output values
-
float uz_pmsm6ph_transformation_get_theta_el(uz_pmsm6ph_transformation_t *self)#
Returns theta electric.
- Parameters:
self – Pointer to driver instance
- Returns:
float theta electric
Nine-phase transformation#
-
typedef struct uz_pmsm9ph_transformation_t uz_pmsm9ph_transformation_t#
-
struct uz_pmsm9ph_config_t#
Configuration struct for the PMSM model IP-Core driver.
-
uz_pmsm9ph_transformation_t *uz_pmsm9ph_transformation_init(struct uz_pmsm9ph_config_t config)#
Initialize an instance of the driver.
- Parameters:
config – Config struct
- Returns:
uz_pmsm9ph_transformation_t* Pointer to an initialized instance of the driver
-
uz_9ph_abc_t uz_pmsm9ph_transformation_get_currents(uz_pmsm9ph_transformation_t *self)#
Returns the results of the inverse transformation (phase varivables)
- Parameters:
self – Pointer to driver instance
- Returns:
struct uz_9ph_abc_t Output values
-
float uz_pmsm9ph_transformation_get_theta_el(uz_pmsm9ph_transformation_t *self)#
Returns theta electric.
- Parameters:
self – Pointer to driver instance
- Returns:
float theta electric
Standalone use#
Vivado#
A small example of usage for the IP core is given below. Note that the intended usage is in combination with the other CIL IP core’s and this IP core has not been optimized for standalone usage. To use this IP core correctly, the RS Flip Flop needs to be added as well, as shown in the screenshot below.
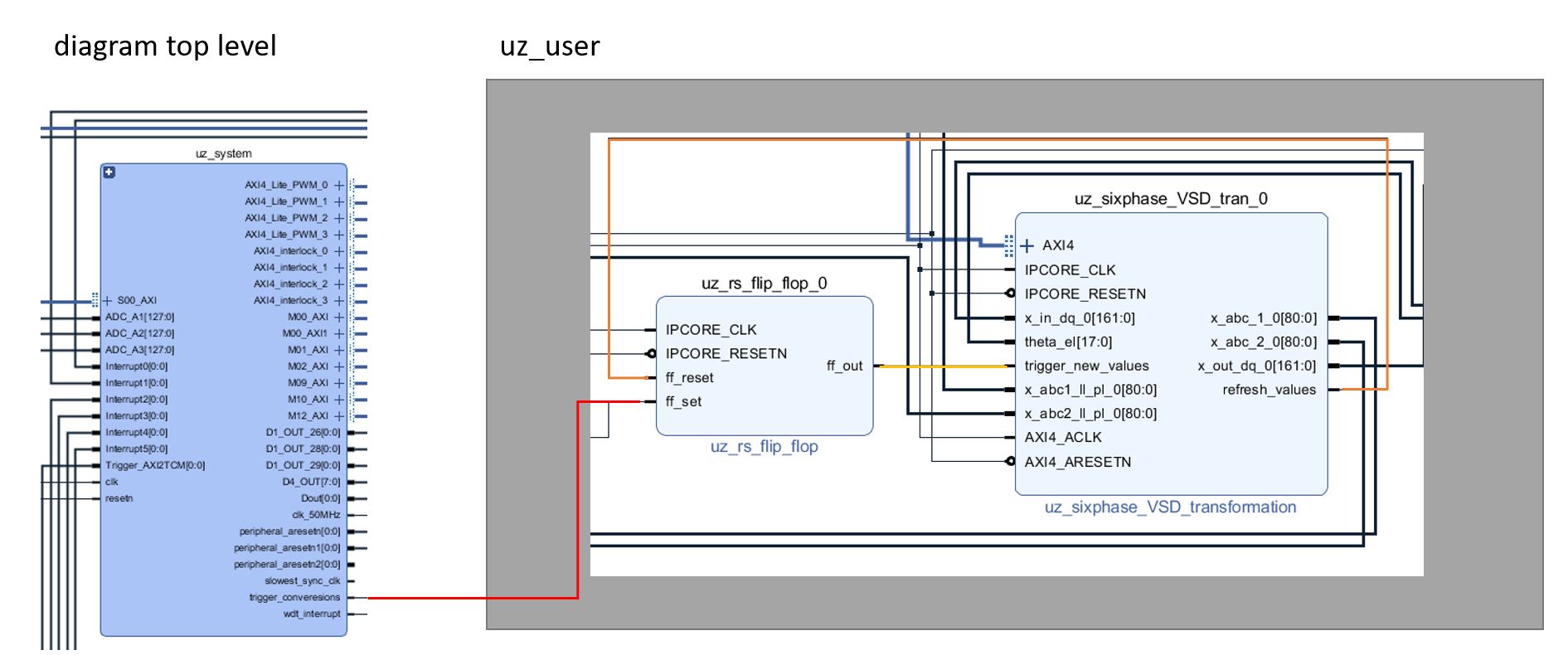
Fig. 386 Connection with Flip Flop#
While most Ports of the IP core should be used for the general application (as shown in CIL PMSM), special attention has to be paid to the trigger_new_values and refresh_values ports.
The first of the two makes the IP core give its current values to the PS and should be triggered by the trigger_conversions signal of the uz_system block, as it would be done for real ADC readouts.
Since there are frequency differences in all those signals, it could be observed, that in some cases the trigger_conversions signal’s high time is too short to be detected by the IP core (compare the following two figures).

Fig. 387 Correct timing for trigger signal (IP core works)#
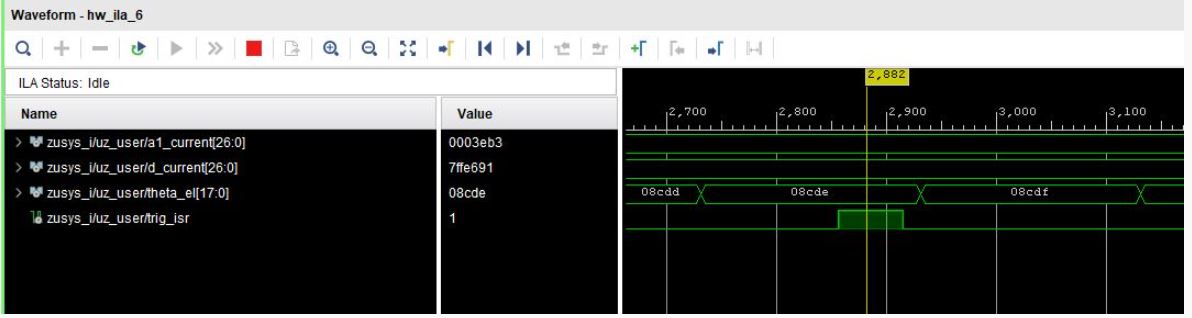
Fig. 388 Incorrect timing for trigger signal (outputs are never updated)#
To synchronize the different clock domains used, the RS Flip Flop is placed, as shown in the first picture.
The flip-flop is set by the trigger_conversions signal and as soon as the IP core receives the high signal, it outputs an acknowledgment at the refresh_values port, which can be used to reset the flip-flop again.
Vitis#
The following function calls show the minimal usage of this IP core. Using it in combination with the whole CIL setup is shown in the example pages in more detail.
...
#include "IP_Cores/uz_pmsm6ph_transformation/uz_pmsm6ph_transformation.h"
uz_pmsm6ph_transformation_t* transformation = NULL; //pointer to transformation object
struct uz_pmsm6ph_config_t transformation_config = { //config to init transformation object
.base_address = XPAR_UZ_USER_UZ_SIXPHASE_VSD_TRAN_0_BASEADDR,
.ip_core_frequency_Hz = 100000000.0f
};
...
int main(void)
{
...
case init_ip_cores:
transformation = uz_pmsm6ph_transformation_init(transformation_config); //init transformation object
...
...
#include "../IP_Cores/uz_pmsm6ph_transformation/uz_pmsm6ph_transformation.h"
extern uz_pmsm6ph_transformation_t* transformation; //pointer to transformation object
uz_6ph_abc_t abc_currents = {0}; //variable to save currents
float theta_el = 0.0f; //variable to save theta_el
...
void ISR_Control(void *data)
{
...
abc_currents = uz_pmsm6ph_transformation_get_currents(transformation); //readout currents
theta_el = uz_pmsm6ph_transformation_get_theta_el(transformation); //readout theta_el
...
Verification#
The following setup is used to test the IP core’s functionality (example for nine-phase IP core). It is not recommended to copy this setup, instead, the above explanation should be used.
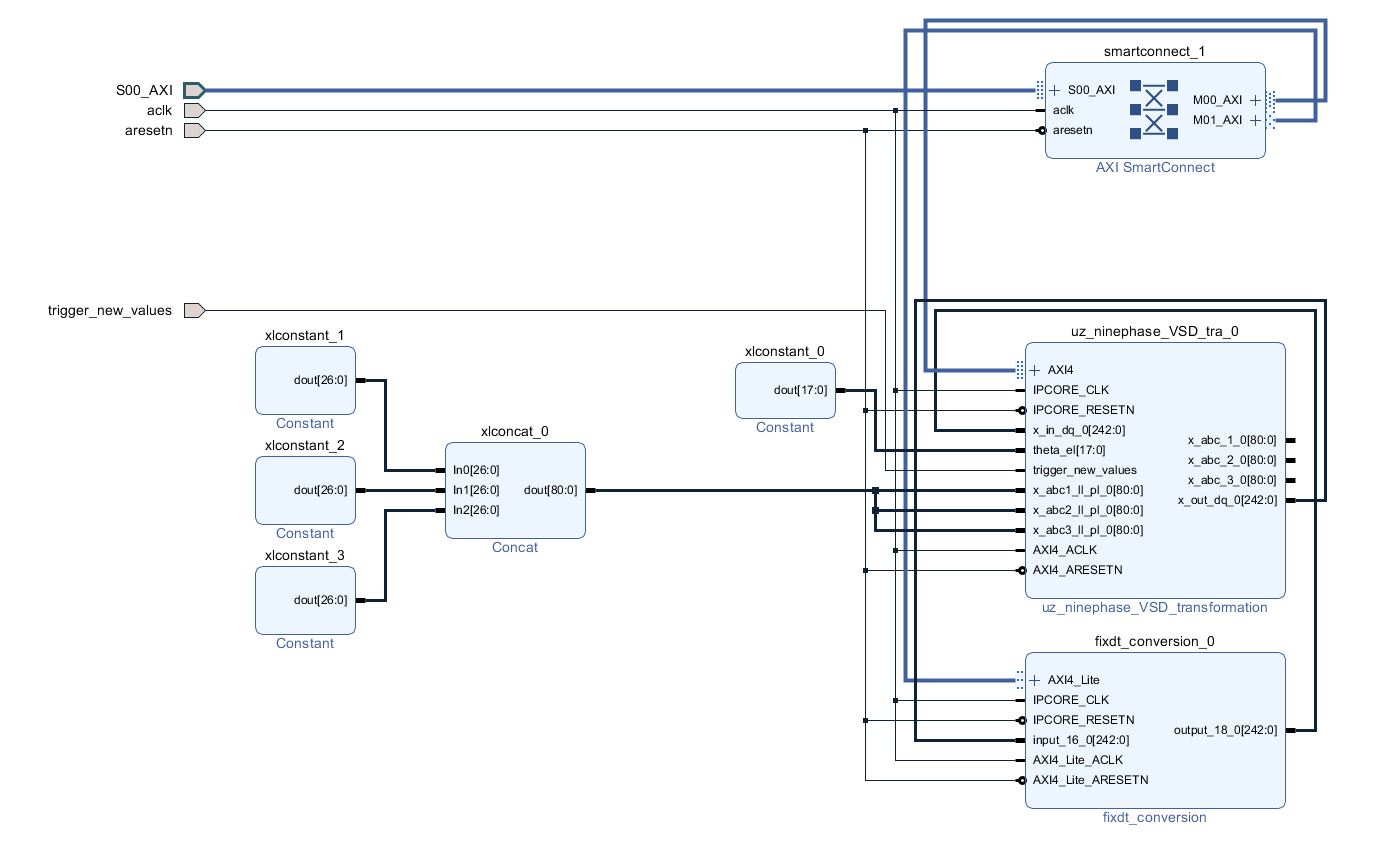
Fig. 389 Test setup for IP core in Vivado#
To test the IP core, random values have been selected for the inputs (values are the same for all three subsets):
Port Name |
Value Decimal |
Value Hex |
|---|---|---|
theta_el |
\(\frac{\pi}{8}\) |
0x1921 |
x_abc1/2/3_ll_pl(1) |
111.9 |
0x06fe666 |
x_abc1/2/3_ll_pl(2) |
31.55 |
0x01f8ccc |
x_abc1/2/3_ll_pl(3) |
-101.99 |
0x79a028f |
The transformed output values from x_out_dq are fed back to the input x_in_dq.
Because of the different fixed point datatypes of the port, a special datatype transformation IP core was created, which is also present as an out-commented subsystem in the Simulink model of the main IP core.
The values of the inverse transformation are read out in the PS and are similar to the input values, after applying the line-to-line to star conversion to them.
The output values from UZ and Simulink match and are shown in the following table.
Port Name |
Value Decimal |
|---|---|
theta_el_axi |
0.3926392 |
x_abc_out_axi(1;4;7) |
71.29803 |
x_abc_out_axi(2;5;8) |
-26.78451 |
x_abc_out_axi(3;6;9) |
-44.51395 |