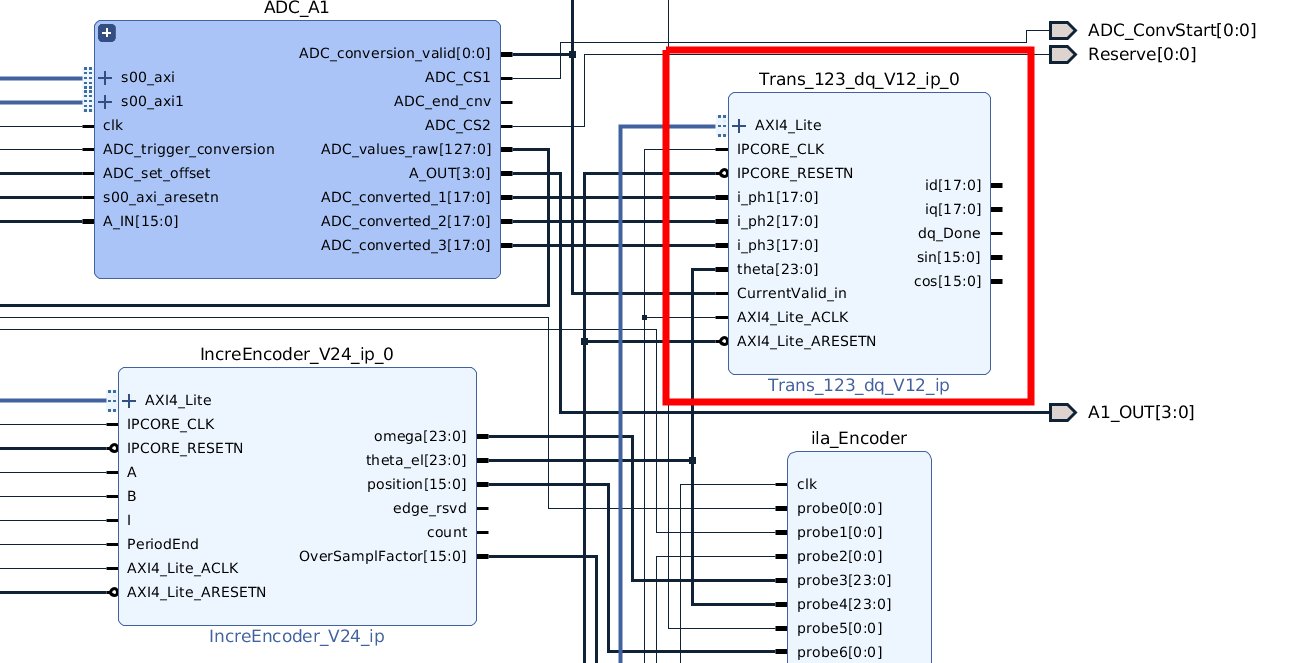
dq-Transformation IP core#
Transforms three input quantities from a three phase system to dq-coordinates
Input interface is PL-only
Transformation can only be triggered by a PL signal, but not by the software driver
Output is supplied to PL-ports as well as AXI4-Lite
Inputs have to be fixed point and match the interface description of Interface of dq-Transformation IP Core
The inputs are transformed on each rising edge on the IP core input
CurrentValid_indq_Doneindicates that the output values are valid to subsequent IP cores
Table Interface of dq-Transformation IP Core lists all input and output ports (AXI and external port) that are present in the IP core.
Port Name |
Port Type |
Data Type |
Target Platform Interfaces |
Range |
Unit |
Function |
|---|---|---|---|---|---|---|
i_ph1 |
Input |
sfix18_En11 |
External Signal |
+/-64 |
A |
phase current 1 |
i_ph2 |
Input |
sfix18_En11 |
External Signal |
+/-64 |
A |
phase current 2 |
i_ph3 |
Input |
sfix18_En11 |
External Signal |
+/-64 |
A |
phase current 3 |
theta |
Input |
sfix24_En20 |
External Signal |
+/-8 |
rad |
electrical motor angle |
theta_offset_AXI |
Input |
sfix24_En20 |
AXI4-Lite |
+/-8 |
rad |
offset of angle sensor |
current_valid_in |
Input |
bool |
External Signal |
trigger ip core calculation |
||
i_d |
Output |
sfix18_En11 |
External Signal |
+/-64 |
A |
current in d-axis |
i_q |
Output |
sfix18_En11 |
External Signal |
+/-64 |
A |
current in q-axis |
i_d_AXI |
Output |
sfix18_En11 |
AXI4-Lite |
+/-64 |
A |
current in d-axis |
i_q_AXI |
Output |
sfix18_En11 |
AXI4-Lite |
+/-64 |
A |
current in q-axis |
dq_done |
Output |
bool |
External Signal |
rising edge if ip core calculation finished |
||
sin |
Output |
sfix16_En14 |
External Signal |
+/-2 |
sine value of angle (+/- 1) |
|
cos |
Output |
sfix16_En14 |
External Signal |
+/-2 |
cosine value of angle (+/- 1) |
|
i_1_AXI |
Output |
sfix18_En11 |
AXI4-Lite |
+/-64 |
A |
phase current 1 |
i_2_AXI |
Output |
sfix18_En11 |
AXI4-Lite |
+/-64 |
A |
phase current 2 |
i_3_AXI |
Output |
sfix18_En11 |
AXI4-Lite |
+/-64 |
A |
phase current 3 |
Vitis#
Initialize one driver instance and read output:
static struct uz_dqIPcore_config_t config={
.base_address= BASE_ADDRESS,
.ip_clk_frequency_Hz=IP_CORE_FRQ,
.theta_offset = -1.5f // add your encoder offset here!
};
uz_dqIPcore_t* test_instance = uz_dqIPcore_init(config);
struct uz_dq_t currents = uz_dqIPcore_get_id_iq(test_instance);
Warning
The software driver has no way to read the trigger transformation signal CurrentValid_in nor the output valid signal dq_Done! Thus, the user has to be sure that a transformation took place and is finished. This means that the driver can mostly be used for debugging control algorithms that are fully implemented in the PL!
Driver reference#
-
typedef struct uz_dqIPcore_t uz_dqIPcore_t#
Object data type definition of the dq IP-Core driver.
-
struct uz_dqIPcore_config_t#
-
uz_dqIPcore_t *uz_dqIPcore_init(struct uz_dqIPcore_config_t config)#
Initialize an instance of the driver for the dq-IP-Core.
- Parameters:
config – Configuration struct for the instance
- Returns:
uz_dqIPcore_t* Pointer to an initialized instance of the driver
-
uz_3ph_dq_t uz_dqIPcore_get_id_iq(uz_dqIPcore_t *self)#
Read the output currents id and iq from the IP-Core and return them.
- Parameters:
self – Pointer to driver instance
- Returns:
uz_dq_t
-
uz_3ph_abc_t uz_dqIPcore_get_i_abc(uz_dqIPcore_t *self)#
Read the input currents i1, i2, and i3 from the IP-Core and return them.
- Parameters:
self – Pointer to driver instance
- Returns:
uz_3ph_abc_t
Vivado#
The only tested clock frequency for IPCORE_CLK and AXI4_Lie_ACLK is 50 Mhz.
Port Name |
CLK |
Usage |
|---|---|---|
AXI4_Lite |
50 MHz |
Connect to AXI_smartconnect |
IPCORE_CLK |
50 MHz |
Connect to 50 MHz clock |
IPCORE_RESETN |
50 MHz |
Connect to 50 MHz reset |
AXI4_LiteACLK |
50 MHz |
Connect to IPCORE_CLK |
AXI4_Lite_ARESETN |
50 MHz |
Connect to IPCORE_RESETN |