Set Point#
Toolbox for a standard set-point module. The input is a reference torque. This will then be converted, depending on the machine type selection, into d- and q-reference currents. It currently supports surface-mounted (SMPMSM) and interior (IPMSM) permanent magnet synchronous machines. IPMSM with a positive and negative saliency ratio are both supported. The output currents will, depending on the operating condition of the machine, either be calculated via MTPA or field-weakening. It can not control a machine on its own.
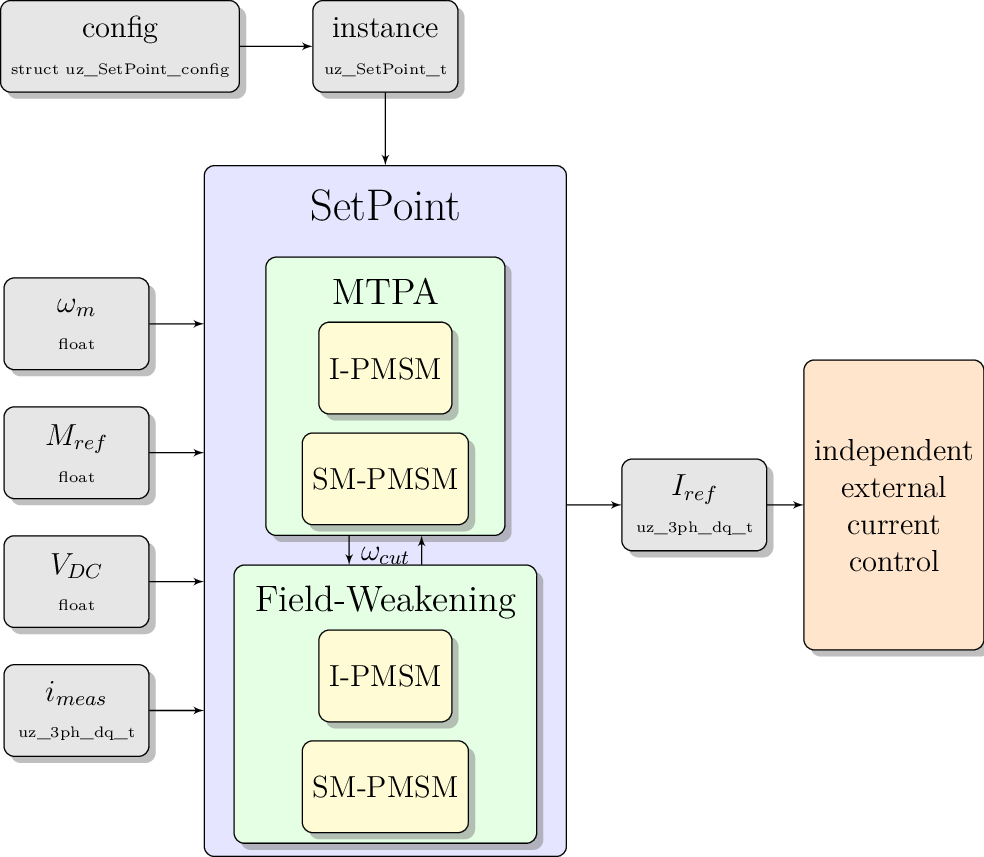
Fig. 389 Schematic overview of the SetPoint module
Setup#
-
typedef struct uz_SetPoint_t uz_SetPoint_t#
Object definition for uz_SetPoint_t.
Configuration#
-
enum uz_Setpoint_motor_type#
enum for selection of machine type
Values:
-
enumerator SMPMSM#
-
enumerator IPMSM#
-
enumerator SMPMSM#
-
struct uz_SetPoint_config#
Configuration struct for Setpoint module. Accessible by the user.
Public Members
-
uz_PMSM_t config_PMSM#
PMSM struct which carries necessary motor related parameters for field weakening and MTPA
-
float id_ref_Ampere#
manual i_d reference current. Will be added on top of the MTPA d-current. Unused, if FW is active.
-
float relative_torque_tolerance#
sets the relative torque tolerance for the newton raphson solver in percent. I.e. with 0.01 tolerance and a M_ref = 8 Nm, the absolute tolerance will be max 0.08 Nm. An assertion triggers, if the approximated iq-current leads to a estimated M_ref which is outside of this tolerance band.
-
bool is_field_weakening_enabled#
flag to enable field_weaking. True = enabled
-
enum uz_Setpoint_motor_type motor_type#
Selection for which motor type is used
SMPMSM -> surface-mounted PMSM (Ld=Lq)
IPMSM -> interior PMSM (Ld=/=Lq)
-
enum uz_Setpoint_control_type control_type#
Selection for which control type is used
FOC -> field oriented control
-
uz_PMSM_t config_PMSM#
Example#
1#include "uz/uz_setpoint/uz_setpoint.h"
2int main(void) {
3 struct uz_SetPoint_config SP_config = {
4 .config_PMSM.I_max_Ampere = 15.0f,
5 .config_PMSM.Ld_Henry = 0.0003f,
6 .config_PMSM.Lq_Henry = 0.0003f,
7 .config_PMSM.R_ph_Ohm = 0.1f,
8 .config_PMSM.polePairs = 4.0f,
9 .config_PMSM.Psi_PM_Vs = 0.0075f,
10 .control_type = FOC,
11 .motor_type = SMPMSM,
12 .is_field_weakening_enabled = false,
13 .id_ref_Ampere = 0.0f
14 .relative_torque_tolerance = 0.001f;
15 };
16}
Init function#
-
uz_SetPoint_t *uz_SetPoint_init(struct uz_SetPoint_config config)#
Initialization of the Setpoint object.
- Parameters:
config – uz_SetPoint_config configuration struct
- Returns:
Pointer to uz_SetPoint_t object
Example#
config according to configuration section#1int main(void) {
2 uz_SetPoint_t* SP_instance = uz_SetPoint_init(SP_config);
3}
Description#
Allocates the memory for the SetPoint instance. Furthermore the input values of the configuration struct are asserted.