System Time R5#
The uz_SystemTime can be used to read the total uptime of the UltraZohm and the number of executed ISR routines on the R5 processor.
See uz/uz_SystemTime/uz_SystemTime.h for API.
Counter with 64-bit at 100 MHz for the uptime of the system.
Uses Xilinx AXI Timer v2.0
64 Bit Mode enabled
Timer will overflow in >5000 years after system boot
Works with two 32-bit counter (lower and upper bits)
Only one instance of system time is possible and only on the R5
Usage#
Include
uz/uz_SystemTime/uz_SystemTime.hand call the APIIntended for usage in the ISR of the R5 processor
Initialize the function outside of the ISR by calling
uz_SystemTime_init()Call
uz_SystemTime_ISR_Tic()to start a time measurement, e.g., the first line of ISRCall
uz_SystemTime_ISR_Toc()to stop the time measurement, e.g., last line of ISRCall the getter functions to read the system time that was read by the last tic call
A lock prevents the call to
tocbeforeticwas calledCalling
tocbeforeticfires an assertionCalling any function of the component before
uz_SystemTime_init()fires an assertion
Warning
The getter functions, e.g., uz_SystemTime_GetUptimeInMs(), return the system time that was read out at the last call to uz_SystemTime_ISR_Tic()! This is intended behavior to have the system time aligned with the start of the ISR.
Example#
The variable uptimeInMs holds the uptime in milliseconds at the start of ISR_Control.
The variable IsrExectionTimeInUs holds the execution time of the ISR, which will be about 100 microseconds + some time for reading the timer.
void ISR_Control(void *data)
{
uz_SystemTime_ISR_Tic();
float uptimeInMs=uz_SystemTime_GetUptimeInMs();
usleep(100); // Do nothing for 100 microseconds
uz_SystemTime_ISR_Toc();
}
int main (void){
float IsrExectionTimeInUs=uz_SystemTime_GetIsrExectionTimeInUs();
}
IP Core#
The AXI Timer v2.0 IP core is abstracted by
uz_AxiTimer64Bit.hwhich wraps the Xilinx drivers (xtmrctr.h)Timer is called
timer_uptime_64bitin Vivado Block Design
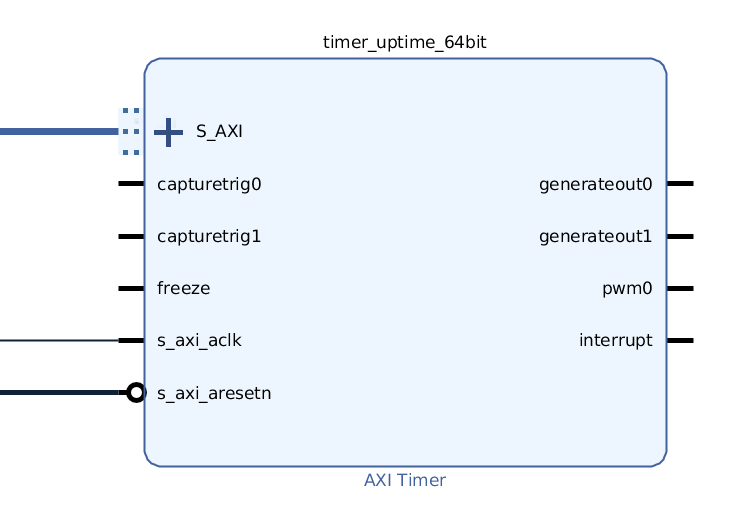
Fig. 372 timer_uptime_64bit IP core for system time#