Clamping function#
-
bool uz_PI_Controller_Clamping_Circuit(float preIntegrator, float preSat, float upper_limit, float lower_limit)#
Compares the values before and after the Integrator and decides if clamping is necessary.
- Parameters:
preIntegrator – value before the integrator
preSat – value after the integrator and before the saturation
upper_limit – Max limit for deadzone. Must be greater than lower limit
lower_limit – min limit for deadzone
- Returns:
Returns true if clamping is necessary
Example#
1#include "uz_piController.h"
2int main(void) {
3 float preIntegrator = 10.5f;
4 float preSat = 1.1f;
5 float upper_limit = 10.0f;
6 float lower_limit = -8.0f;
7 bool clamp = uz_PI_Controller_Clamping_Circuit(preIntegrator, preSat, upper_threshold, lower_threshold);
8}
Description#
Compares the values before the integrator preIntegrator and before the output limitation preSat. Activates clamping if preSat is outside the limit and preIntegrator and preSat have the same sign.
The function is called by sample-function.
Warning
The values for upper_limit and lower_limit must be the same as configured in the PI-Controller configuration struct.
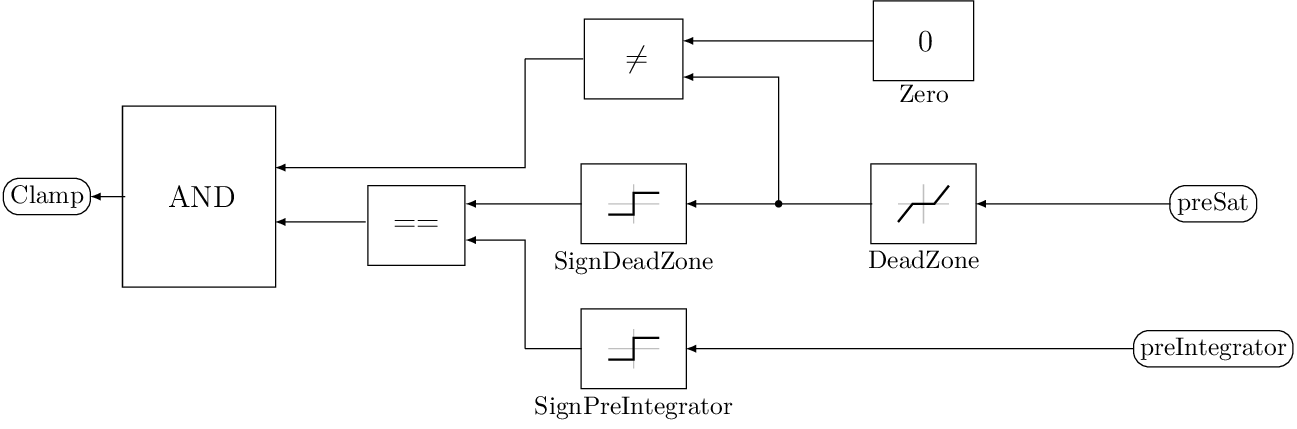
Fig. 385 Clamping circuit