Sample function#
-
float uz_PI_Controller_sample(uz_PI_Controller *self, float referenceValue, float actualValue, bool ext_clamping)#
Calculates the last sample of the PI-Controller.
- Parameters:
self – uz_PI_Controller instance
referenceValue – reference value for error calculation
actualValue – actual value for error calculation
ext_clamping – input port for an external clamping signal
- Returns:
float
Example#
Listing 159 Example function call to calculate the PI-Controller output. PI-Instance via init-function#
1#include "uz_piController.h"
2int main(void) {
3 float referenceValue = 1.5f;
4 float actualValue = 1.1f;
5 bool ext_clamping = false;
6 float output = uz_PI_Controller_sample(PI_instance, referenceValue, actualValue, ext_clamping);
7}
Description#
Calculates one sample of the PI-Controller. It has an output limitation and a corresponding clamping circuit. Furthermore, it has an input port for an external clamping signal. The error between the reference and actual value will be calculated inside the function.
Warning
The sample function has to be called with the same sample time as specified in the samplingTime_sec member of the configuration struct.
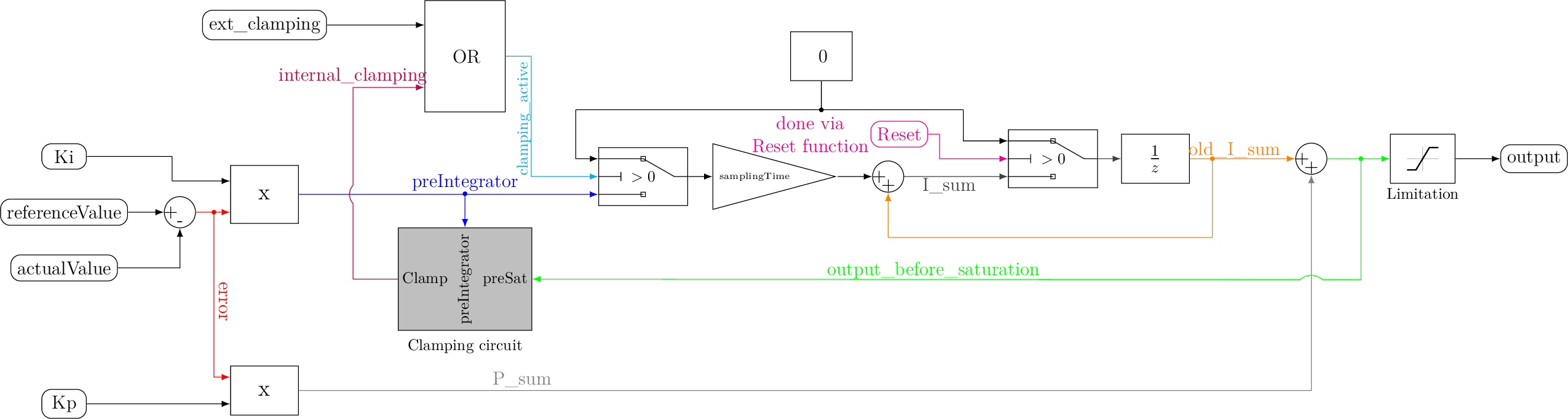
Fig. 386 parallel PI-Controller schematic
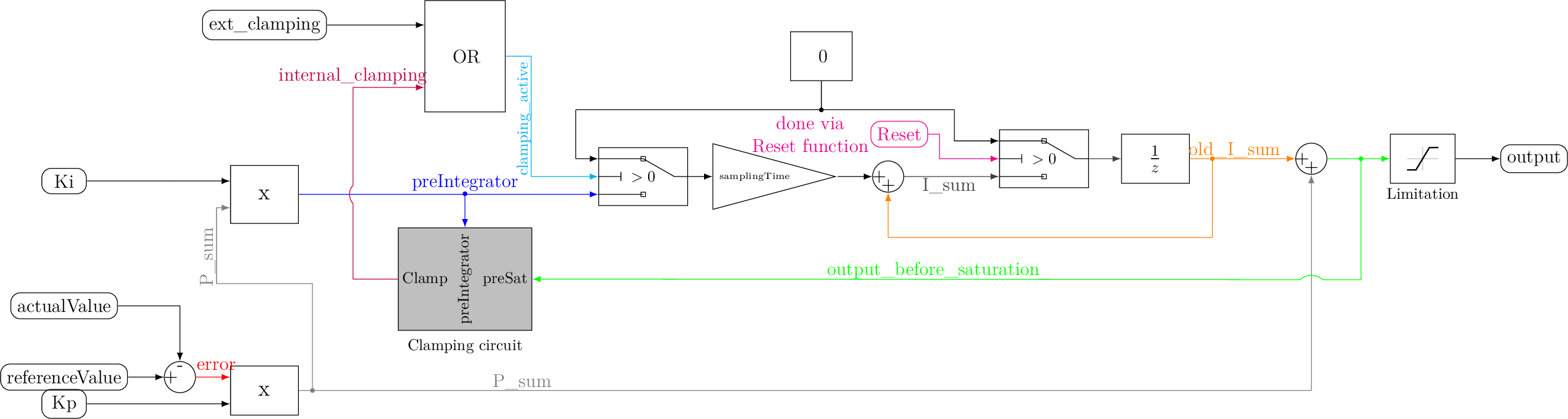
Fig. 387 ideal PI-Controller schematic