Ramp#
-
struct uz_ramp_config#
Configuration struct for the ramp module.
-
uz_ramp_t *uz_ramp_init(struct uz_ramp_config config)#
Initializes a ramp instance with configurable slope and sample time.
- Parameters:
config – Configuration struct of the ramp module
- Returns:
uz_ramp_t* Pointer to ramp instance
-
float uz_ramp_step(uz_ramp_t *self, float reference_value)#
Executes one ramp step and updates the internal output linearly towards the reference value.
- Parameters:
self – Pointer instance of uz_ramp_t
reference_value – Target value for the ramp output
- Returns:
float Current ramp output
-
void uz_ramp_set_to_value_instant(uz_ramp_t *self, float value)#
Sets the current ramp output to a defined value instantly without the ramp.
- Parameters:
self – Pointer instance of uz_ramp_t
value – New current ramp output
-
void uz_ramp_reset(uz_ramp_t *self)#
Resets the current ramp output to zero.
- Parameters:
self – Pointer instance of uz_ramp_t
Example#
1#include "uz_signals.h"
2
3int main(void) {
4 struct uz_ramp_config config = {
5 .maximum_slope_per_second = 100.0f,
6 .sample_time_seconds = 0.0001f,
7 .initial_value = 0.0f
8 };
9 uz_ramp_t *speed_reference_ramp = uz_ramp_init(config);
10 float reference_value = 500.0f;
11 float ramped_reference = uz_ramp_step(speed_reference_ramp, reference_value);
12}
Description#
uz_ramp_step limits the rate of change of a signal.
On every call, the output moves linearly from the current output value towards the requested reference value.
The maximum change per call \(\Delta_{max}\) is given by:
where \(slope_{max}\) is the configured maximum slope per second, and \(T_s\) is the sample time. If the remaining distance to the target is smaller than \(\Delta_{max}\), the output is set directly to the target value. Otherwise, the output changes by exactly \(\Delta_{max}\) in the direction of the target.
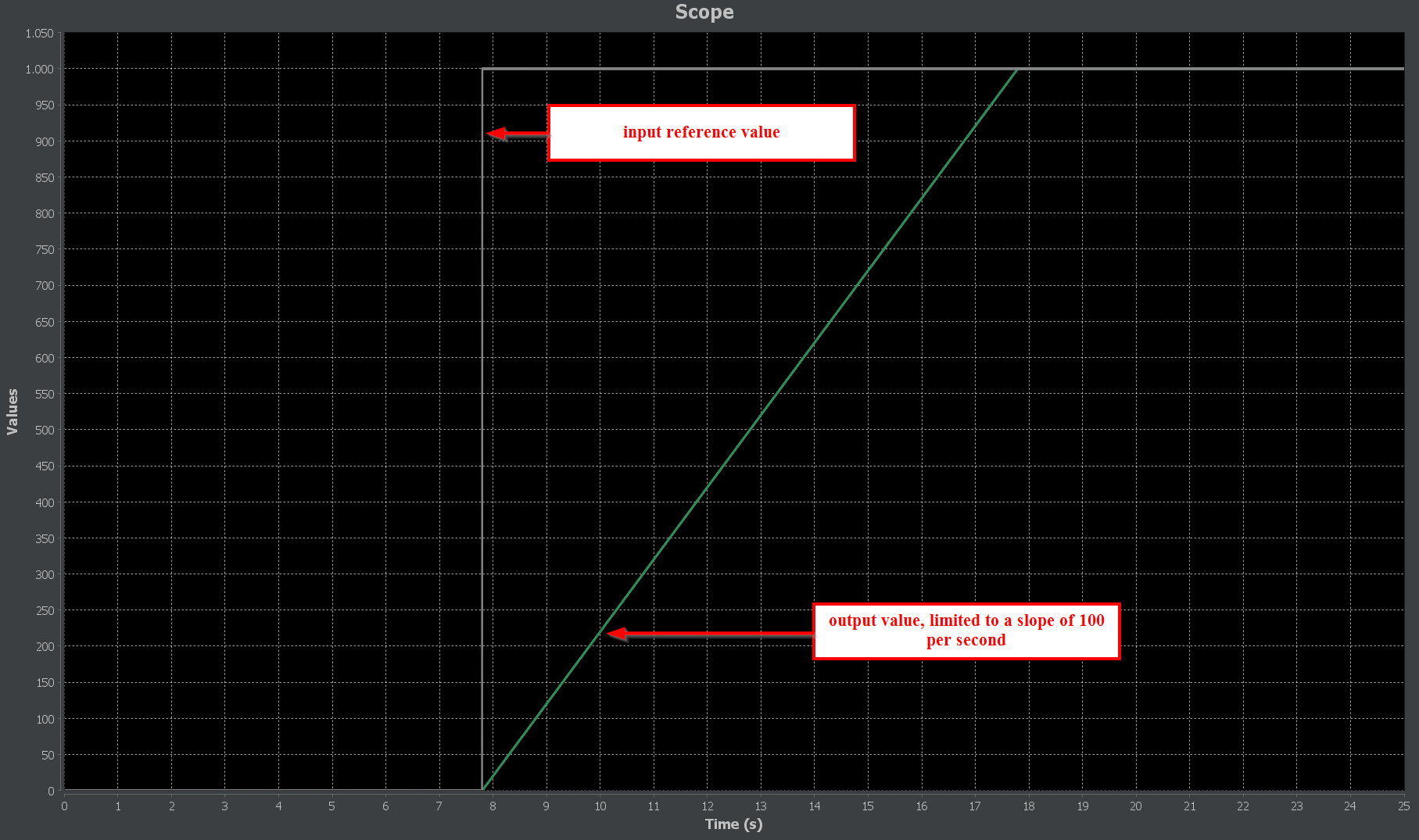
Fig. 328 Result of a test scenario with an input change from 0 to 1000 with a configured slope of 100 per second.#
Changing the input reference_value during execution of the ramp, this changed input becomes the new target, and the ramp will re-aim toward the new reference_value.
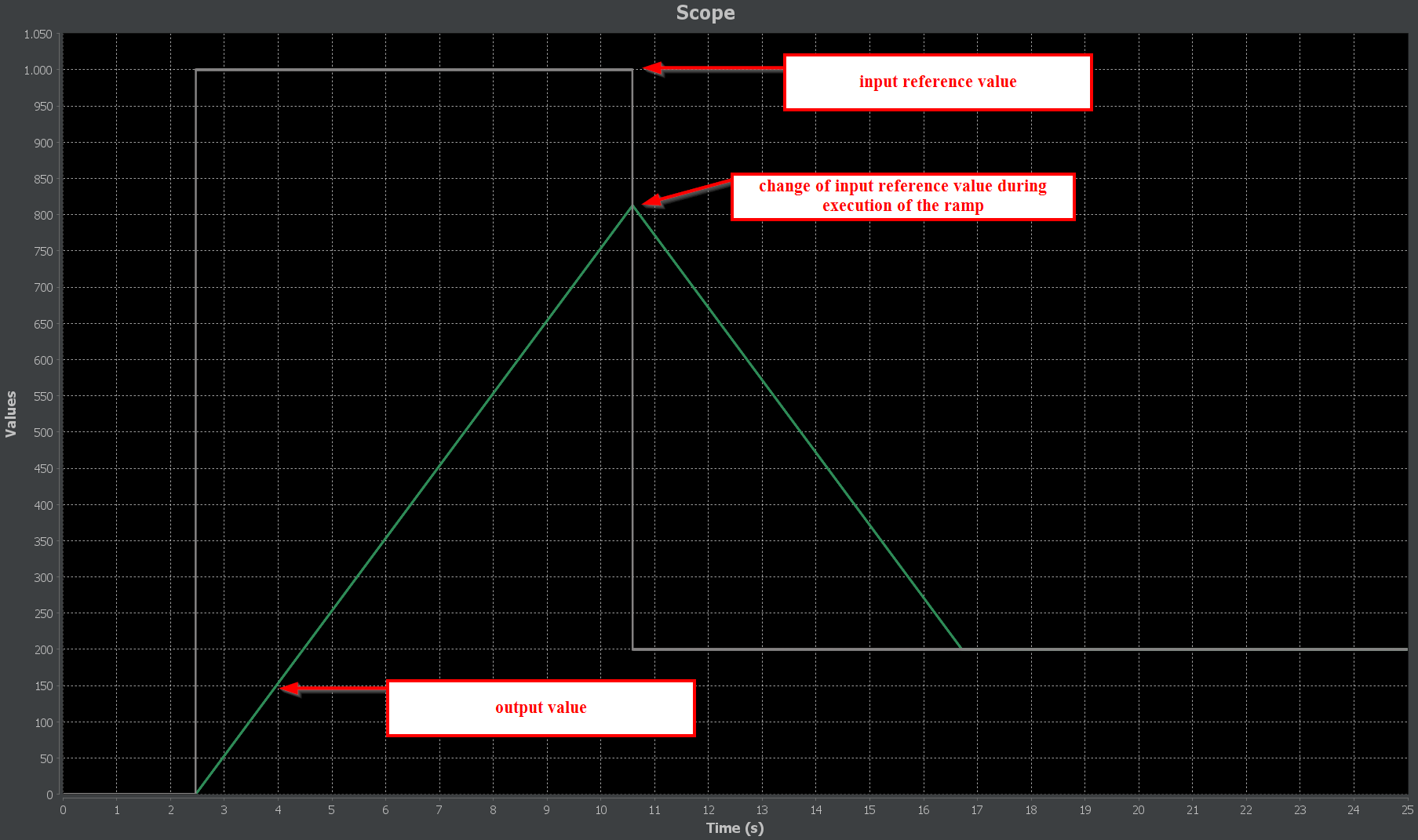
Fig. 329 Result of the test scenario above, where during execution of the ramp a new input value of 200 is provided.#
Warning
When not reset by calling uz_ramp_reset(uz_ramp_t *self), the ramp will keep its last output value.